|
|
DS18B20 русское описание работы с датчиком температуры
Автор
Чернов Геннадий.
статья в формате .pdf -->
Рекомендую прочитать полностью.
DS18B20 цифровой термометр с программируемым разрешением, от 9 до 12–bit, которое может сохраняться в EEPROM памяти прибора. DS18B20 обменивается данными по 1-Wire шине и при этом может быть как единственным устройством на линии так и работать в группе. Все процессы на шине управляются центральным микропроцессором. Диапазон измерений от –55°C до +125°C и точностью 0.5°C в диапазоне от –10°C до +85°C. В дополнение, DS18B20 может питаться напряжением линии данных (“parasite power”), при отсутствии внешнего источника напряжения. Каждый DS18B20 имеет уникальный 64-битный последовательный код, который позволяет, общаться с множеством датчиков DS18B20 установленных на одной шине. Такой принцип позволяет использовать один микропроцессор, чтобы контролировать множество датчиков DS18B20, распределенных по большому участку. Приложения, которые могут извлечь выгоду из этой особенности, включают системы контроля температуры в зданиях, и оборудовании или машинах, а так же контроль и управление температурными процессами.
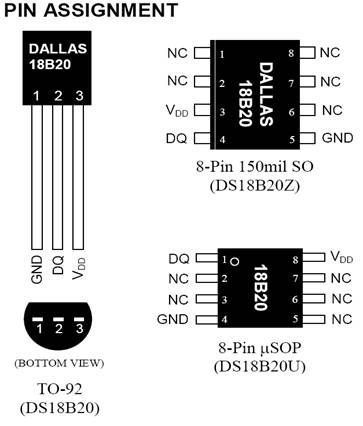
Назначение выводов Таблице 1
*Все остальные выводы должны оставаться не подключенными. Краткий обзор.
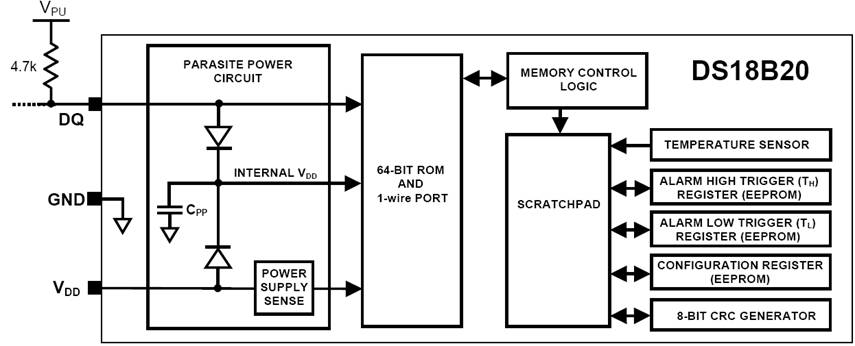
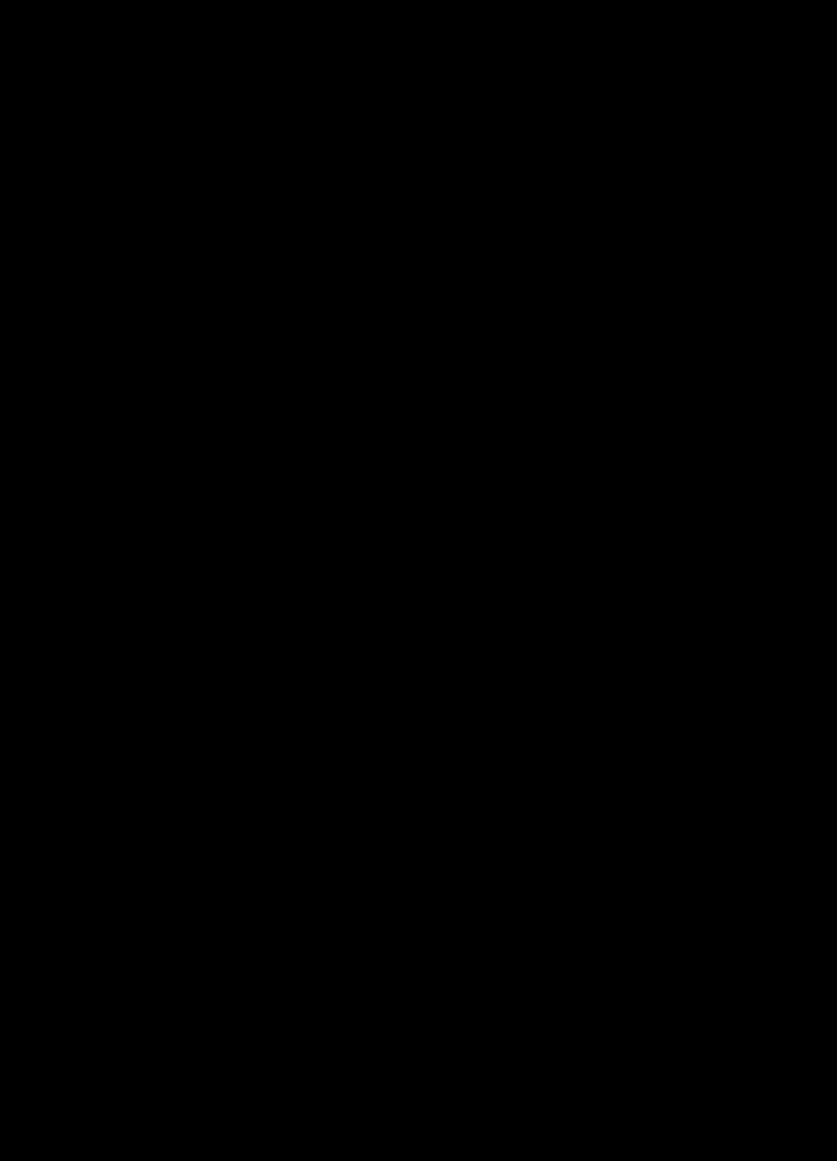
Иллюстрация 1 показывает блок-схему DS18B20, и описания выводов даются в Таблице 1. 64-битовый ROM запоминает уникальный последовательный код прибора. Оперативная память содержит 2-байтовый температурный регистр, который хранит значение температуры по окончанию температурного преобразования. Два однобайтовых регистра температуры контроля температуры (триггерной схемы TH и TL), и к регистру конфигурации. Регистр конфигурации позволяет пользователю устанавливать разрешающую способность цифрового преобразователя температуры к 9, 10, 11, или 12 битам, это и влияет на время конвертирования температуры. TH, TL и регистры конфигурации энергонезависимы (EEPROM), таким образом они сохранят данные, когда прибор - выключен. DS18B20 использует исключительно 1-Wire протокол – при этом формируется соединение, которое осуществляет коммуникацию на шине, используя всего один управляющий сигнал. Шина должна быть подключена к источнику питания через подтягивающий резистор, так как все устройства связаны с шиной, используют соединение через Z-состояния или вход открытого стока. Используя эту шину микропроцессор (устройство управления) идентифицирует и обращается к датчикам температуры, используя 64-битовый код прибора. Поскольку каждый прибор имеет уникальный код, число приборов, к которым можно обратиться на одной шине, фактически неограниченно. Другая особенность DS18B20 - способность работать без внешнего питания. Эта возможность предоставляется через подтягивающий резистор. Высокий сигнал шины заряжает внутренний конденсатор (CPP), который питает прибор, когда на шине низкий уровень. Этот метод носит название «Паразитное питание». При этом максимальная измеряемая температура составляет + 100 °C. Для расширения диапазона температур до + 125 °C необходимо использовать внешнее питание. Рисунок 1
Режим – конвертации температуры Основные функциональные возможности DS18B20 - его температурный преобразователь. Разрешающая способность температурного преобразователя может быть изменена пользователем и составляет 9, 10, 11, или 12 битов, соответствуя приращениям (дискретности измерения температуры) 0.5 °C, 0.25°C, 0.125°C, и 0.0625°C, соответственно. Разрешающая способность по умолчанию установлена 12-бит. В исходном состоянии DS18B20 находится в состоянии покоя (в неактивном состоянии). Чтобы начать температурное измерение и преобразование, ведущий должен подать команду начала конвертирования температуры [0х44]. После конвертирования, полученные данные запоминаются в 2-байтовом регистре температуры в оперативной памяти, и DS18B20 возвращается к неактивному состоянию. Если DS18B20 включен с внешним питанием, ведущий может контролировать конвертирование температуры (после команды [0х44]) по состоянию шины. DS18B20 будет формировать (ответ на слот времени чтения от устройства управления) логический «0» когда происходит температурное преобразование. И логическую «1», когда конвертирование выполнено. Если DS18B20 включен с паразитным питанием, эта технология уведомления не может быть использована, так как шину нужно подать высокий уровень (напряжение питания) в течение всего времени температурного преобразования. В этом случае устройство управления должно самостоятельно контролировать время конвертирования. Выходные температурные данные DS18B20 калиброваны в градусах Цельсия. Температурные данные запоминаются как 16-битовое число со знаком (см. рис. 2). Биты признака (S) указывают, является ли температура положительная или отрицательная: для положительных S = 0, а для отрицательных чисел S = 1. Если DS18B20 будет настроен для конвертирования 12-битной разрешения, то все биты в температурном регистре будут содержать действительные данные. Для 11-битной разрешающей способности, бит 0 неопределен. Для 10-битной разрешающей способности, биты 1 и 0 неопределенны, и для 9 битной разрешающей способности 2, 1 и 0 неопределенны. Таблица 2 дает примеры данных цифрового выхода и соответствующей температуры, для 12- битной разрешающей способности. Формат регистра термпературы рис. 2
TEMPERATURE/DATA RELATIONSHIP Таблица 2
*при подаче питания в температурный регистр записано число +85°C
Операция — передача сигналов аварии После того, как DS18B20 выполнит температурное преобразование, температурное значение - сравнивается со значением, записанным в регистры TH и TL (определенные пользователем, см. рис. 3). Бит признака (S) указывает, положительное или отрицательное значение: для положительных чисел S = 0 и для отрицательного числа S = 1. Регистры TH и TL энергонезависимы (EEPROM), таким образом, они сохранят данные, когда устройство обесточено. К TH и TL можно обратиться через байты 2 и 3 согласно карте памяти, как объяснено в разделе ПАМЯТИ этой спецификации.
Формат регистров TH и TL рис. 3
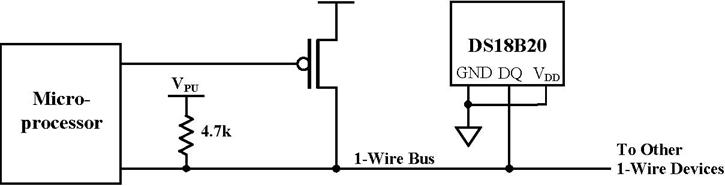
Для сравнения используются только биты 4-11 из регистра температуры (целое значение температуры). Если измеренная температура ниже или равна TL или выше или равна TH, формируется условие Аварии, и устанавливается флаг Аварии в DS18B20. Этот флаг обновляется после каждого температурного преобразования; поэтому, если условие Аварии пропадет, то флаг будет сброшен после следующего температурного преобразования. Главное устройство может проверить условие Аварии всех DS18B20 на шине, подавая команду Поиск Аварии [ECh]. Любой DS18B20 с установленным флагом Аварии ответит на эту команду, таким образом главное устройство точно может определит, какие DS18B20 находятся в состоянии Аварии. Если изменены значение регистров TH или TL, то необходимо запустить новое температурное преобразование, чтобы выполнилось проверка условий контроля температуры, заданное в регистрах TH или TL. Питание DS18B20 DS18B20 может быть включен с внешним питанием VDD, или он может работать в режиме «паразитного питания», которое позволяет DS18B20 функционировать без питания на выводе VDD. Паразитное питание очень полезно для приложений, которые требуют отдаленного температурного считывания, или это ограничение связано со старыми линиями коммуникаций, где уже проложено только два провода. Рис. 4 показывает схему подключения DS18B20 с паразитным питанием, во время конвертирования и формирования импульсов высокого уровня через транзистор на шину данных подается питание Vpu. Это напряжение сохраняется на конденсаторе паразитного питания (CPP), чтобы обеспечить питание устройства, когда на шине данных низкий уровень. Чтобы DS18B20 использовать в режиме паразитного питания, вывод VDD должен быть подключен к выводу GND. В режиме паразитного питания, шина 1-Wire и CPP должны обеспечить достаточный ток для всех функций DS18B20. Требования к напряжению по постоянному току смотрите в разделе ЭЛЕКТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ. Когда DS18B20 выполняет температурные преобразования или копирует данные с ОЗУ в память EEPROM, может потреблять ток до 1.5 mA. Этот ток может вызвать недопустимое снижение напряжения на шине питаемого через резистор. Чтобы гарантировать, что DS18B20 имеет достаточный ток питания, необходимо обеспечить высокоточное питание на шине каждый раз, когда идет температурные преобразование или выполняется операция записи данных в EEPROM. Это может быть достигнуто при использовании MOSFET транзистора, чтобы запитать шину непосредственно Vpu как это показано на рис. 4. Шина 1-Wire должна быть переключена в высокоточное питание в пределах 10 мкс (максимум) после команды конвертирования температуры Convert T [44h] или команды Copy Scratchpad [48h] (копирования данных в EEPROM). Шина должна быть переключена в высокоточное питание на время преобразования (tconv) или передачи данных (twr = 10ms). Никакие операции на шине не должны выполняться, когда включен высокоточный pullup.
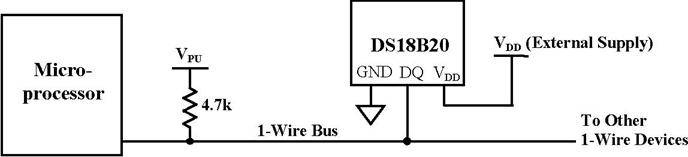
DS18B20 может также быть запитан обычным методом, соединением внешнего электропитания к выводу VDD, как показано в рис. 5. Преимущество этого метода состоит в том, что нет необходимости в использовании MOSFET транзистора. А на шине могут передаваться данные в течение времени температурного преобразования.
Использование паразитного питания не рекомендуется для температур свыше +100 ' C, так как DS18B20 может не быть в состоянии выполнять конвертирование температуры и связь из-за более высокого тока утечки, который может быть при высокой температуре. Для приложений, для которых такие температуры являются вероятными, настоятельно рекомендуется, что бы DS18B20, был запитан внешним питанием.
В некоторых ситуациях, может возникнуть необходимость в определении состояния режима питания, которое использует датчик температуры, для необходимости использования управления питанием внешним транзистором для выполнения температурных преобразований. Для получения информации микропроцессор должен выдать команды Skip ROM [CCh] (Пропуск ROM), сопровождаемая командой Чтение Электропитания (Read Power Supply) [B4h], сопровождаемой “слотом времени чтения”. В течение чтения слота времени, DS18B20s с паразитным питанием установит шину в ноль, а DS18B20s с внешним питанием оставят шину в состоянии единицы.
Подключение DS18B20 в режиме паразитного питания рис 4. VPU
Подключение DS18B20 в режиме внешнего питания рис 5.
64-BIT код датчика
Каждый DS18B20 содержит уникальный 64-битовый код (см. рис. 6), сохраненный в ROM. Младшие 8 битов кода ROM содержат код семейства 1-Wire проводом DS18B20’s: 28h. Следующие 48 битов, содержат уникальный серийный номер. Старшие 8 битов содержат циклический контроль избыточности (CRC) байт, который вычислен от первых 56 битов кода ROM. Детализированное объяснение битов циклического контроля избыточности обеспечивается в разделе GENERATION циклического контроля избыточности. 64-битовый код ROM и связанная функция ROM управляют логикой, позволяют DS18B20 работать как 1-Wire устройство, используя протокол, детализированный в разделе 1-WIRE BUS SYSTEM этой таблицы данных.
64-BIT LASERED ROM CODE рис. 6
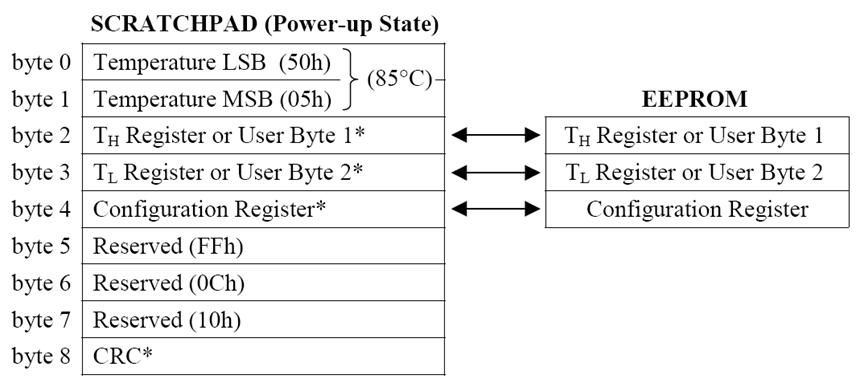
ПАМЯТЬ Память DS18B20’s организована, как показано на рис. 7. Память состоит из оперативной SRAM памяти и энергонезависимой памяти EEPROM. Первые два регистра это регистры конвертора температуры, далее идут регистры Аварии верхнего и нижнего предела (TH and TL) и регистр конфигурации. Обратите внимания, что, если функция Аварии DS18B20 не используется, то регистры TH and TL могут ячейками универсальной памяти. Все команды памяти описаны подробно в разделе FUNCTION COMMANDS DS18B20. Байт 0 и байт 1 из ОЗУ содержит младший и старший бит температурного регистра, соответственно. Эти байты только для чтения. Байты 2 и 3 обеспечивают доступ к регистрам TH and TL. Байт 4 содержит данные регистра конфигурации, которые объясняются подробно в разделе РЕГИСТРА КОНФИГУРАЦИИ (CONFIGURATION REGISTER) этой таблицы данных. Байты 5, 6, и 7 зарезервированы для внутреннего использования устройством и запись в эти регистры невозможна; при чтении эти байты возвратят «1» во всех разрядах. 8 Байт ОЗУ только для чтения и содержат циклический контроль избыточности (CRC) код, вычисленный для байтов 0 - 7 ОЗУ. DS18B20 генерирует циклический контроль избыточности, используя метод, описанный в разделе генерация циклического контроля избыточности. Для записи данных в байты 2, 3, и 4 ОЗУ используем команду Write Scratchpad [4Eh]; данные должны быть переданы к DS18B20, начиная с байта 2. Чтобы проверить корректность записи данных, необходимо выполнить чтение (используя команду чтения Read Scratchpad [BEh]) после того, как данные будут записаны. Обратите внимание, что при чтении данные DS18B20 начинает передавать с 0 байта. Чтобы сохранить TH, TL и данные регистра конфигурации в EEPROM, устройство управление должно выдать команду Copy Scratchpad [48h]. Данные, сохраненные в регистрах EEPROM, при включении питания перезагружаются в ОЗУ. Данные могут быть перезагружены из EEPROM в ОЗУ в любое время командой Recall E2 [B8h]. Устройство управления может контролировать операцию Recall E2 [B8h] (процесс вызова данных из EEPROM в ОЗУ) путем выдачи синхроимпульса после команды и контроля состояния шины, если 0 операция перезагрузки продолжается, если 1 процесс выполнен.
DS18B20 карта памяти рис.7
*Состояние после включения питания зависит от значений, сохраненного в EEPROM
Регистр конфигурации
Байт 4 памяти содержит регистр конфигурации, который организован, как иллюстрировано на рис. 8. Пользователь может настроить конверсионную разрешающую способность DS18B20, используя биты R0 и R1 в этом регистре, как показано в Таблице 3. Значение по умолчанию включения питания этих битов - R0 = 1 и R1 = 1 (12-битовая разрешающая способность). Обратите внимание, что есть прямая зависимость между разрешающей способностью и конверсионным временем. Бит 7 и биты от 0 до 4 в регистре конфигурации зарезервированы для внутреннего использования устройством и не могут быть изменены или использованы пользователем, при чтении эти биты возвращают «1».
Регистр конфигурации рис. 8
КОНФИГУРАЦИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ТЕРМОМЕТРА Таблица 3
СИСТЕМА ШИНЫ С 1 ПРОВОДОМ.
Система шины 1-Wire использует одно главное устройство управления, чтобы управлять одним или более подчиненными устройствами. DS18B20 всегда используется как подчиненное устройство. Когда есть только одно подчиненное устройство на шине, система упоминается как "единственное снижение" система; система - "мультиснижение", если на шине присутствуют несколько подчиненных устройств. Все данные и команды передаются младшим битом в перед. Следующее описание шины 1-Wire разделено на три темы: аппаратные средства и конфигурация, операционная последовательность, и сообщающий 1 провод (сообщают о типах и рассчитывающий).
КОНФИГУРАЦИЯ АППАРАТНЫХ СРЕДСТВ
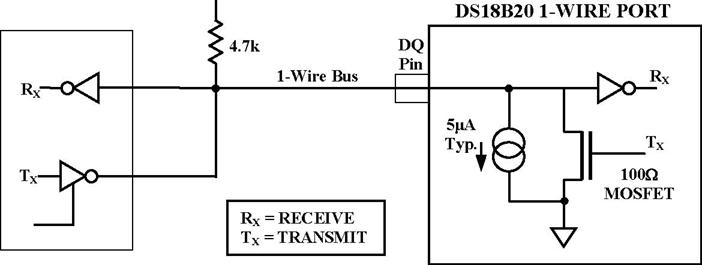
Шина 1-Wire проводом имеет по определению только единственную линию данных. Каждое устройство (управляющее или подчиненное), используют интерфейсы к шине данных через устройства с открытым коллектором или порт с тремя состояниями. Это позволяет каждому устройству "выпускать" линию данных, когда устройство не передает данные, таким образом шина доступна для использования другим устройством. Порт 1-Wire проводом DS18B20 (способный к глубокой вытяжке вывод) - открытая утечка с внутренней схемой, эквивалентной, которому показывают в рис. 10. Шина 1-Wire проводом требует внешнего подтягивающего резистора приблизительно 5 кБ; таким образом, неактивное состояние для 1-Wire шины логическая единица. Если по какой-нибудь причине обмен данными должен быть приостановлен, шину НУЖНО оставить в неактивном состоянии. Восстановления питания происходит между передачей битов, когда шина находится в высоком состоянии. Если шина будет переведена в низкое состояние на время более чем 480 мкС, то все компоненты на шине будут сброшены (инициализированы).
Конфигурация шины рис. 10 VPU
Последовательность операций
Последовательность операций для обращения к DS18B20:
Шаг 1. Инициализация Шаг 2. Команда ROM (сопровождаемая любым требуемым обменом данных) Шаг 3. Функциональная Команда DS18B20 (сопровождаемая любым требуемым обменом данных)
Очень важно следовать за этой последовательностью каждый раз, когда обращаются к DS18B20, поскольку DS18B20 не будет «отвечать», если любые шаги в последовательности отсутствуют или не в порядке. Исключения из этого правила составляют команды – Поиск ROM [F0h] и Поиск Аварии [ECh]. После подачи любой из этих команд, контроллер управления (управляемая программа) должен возвратиться к Шагу 1 в последовательности операций обращения. Инициализация
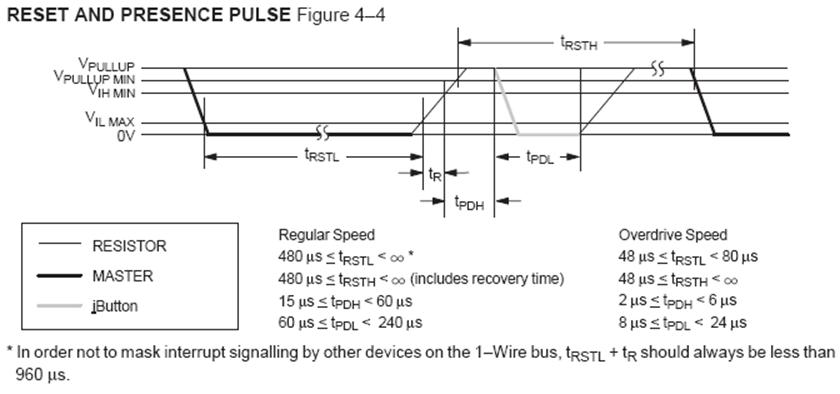
Все операции на шине (1-Wire bus) начинаются с последовательности инициализации. Последовательность инициализации состоит из импульса сброса, переданного устройством управления шиной, сопровождаемым импульсом(ами) присутствия, переданными подчиненными устройствами. Импульс присутствия позволяет устройству управления шиной знать, что подчиненные устройства (типа DS18B20) присутствуют на шине и готовы к работе.
Временные характеристики для сброса и импульсов присутствия детализированы в разделе ПРОЦЕДУРА ИНИЦИАЛИЗАЦИИ: ИМПУЛЬСЫ СБРОСА И ПРИСУТСТВИЯ.
Команды ROM
После того, как устройство управления шиной обнаружило импульс присутствия, оно может формировать команды ROM. Эти команды оперируют уникальными кодами ROM на 64 бита для каждого подчиненного устройства, и позволяют устройству управления выбирать определенное устройство, из многих устройств присутствующих на шине. Эти команды также позволяют устройству управления определять как много и какие типы устройств присутствуют на шине, а также определять любое устройство, находящееся в состоянии Тревога. Есть пять команд ROM, и каждая команда 8 битов длиной. Главное устройство должно передать соответствующую команду ROM перед передачей команды функции DS18B20. Блок-схема для операций команд ROM показывают в Рисунке 11.
SEARCH ROM [F0h] - (ПОИСК ROM)
Когда система первоначально включена, главное устройство должно идентифицировать коды ROM всех подчиненных устройств на шине, эта команда позволяет устройству управления определять номера и типы подчиненных устройств. Устройство управления изучает коды ROM через процесс устранения, которое требует, чтобы Главное устройство исполнил цикл Поиска ROM (то есть, команда ROM Поиска, сопровождаемая обменом данных). Эту процедуру необходимо выполнить столько раз, сколько необходимо, чтобы идентифицировать все из подчиненных устройств. Если есть только одно подчиненное устройство на шине, более простая команда Чтения ROM (см. ниже) может использоваться место процесса Поиска ROM. Для детального объяснения процедуры Поиска ROM, обратитесь ® Книге Стандартов в www.ibutton.com/ibuttons/standard.pdf. После каждого цикла Поиска ROM, устройство управления шиной должно возвратиться к Шагу 1 (Инициализация) в операционной последовательности. READ ROM [33h]
Эта команда может только использоваться, когда есть одно подчиненное устройство на шине. Эта команда позволяет устройству управления шиной читать ROM подчиненного устройства (код 64 бита), не используя процедуру Поиска ROM. Если эта команда используется там, где больше чем одно подчиненное устройство на шине, произойдет конфликт на уровне данных, так как все подчиненные устройства сделают попытку ответить в одно и то же время.
MATCH ROM [55h] Соответствие ROM [55h] Команда соответствия ROM, сопровождаемая последовательностью кода ROM на 64 бита позволяет устройству управления шиной обращаться к определенному подчиненному устройству на шине. Только подчиненное устройство, которое точно соответствует 64 битам последовательности кода ROM, ответит на функциональную команду, выпущенную главным устройством. Все другие подчиненные устройства на шине будет ждать импульса сброса.
SKIP ROM [CCh] Пропуск ROM [CCh] Главное устройство может использовать эту команду, чтобы обратиться ко всем устройствам на шине одновременно. Например, главное устройство может заставить, чтобы все DS18B20 (датчики температуры) на шине, начали одновременно температурные преобразования. Для этого необходимо выдать на шину команду Пропуска ROM [CCh] сопровождаемую командой Температурного преобразования [44h]. Обратите внимание, что команда ЧТЕНИЕ ПАМЯТИ [BEh] может следовать за командой Пропуска ROM, только если на шине присутствует одно подчиненное устройство. Команда Пропуска ROM, сопровождаемая командой ЧТЕНИЕ ПАМЯТИ вызовет конфликт на уровне данных на шине, если на шине более одного подчиненного устройства, так как все устройства будут пытаться одновременно передавать данные.
ALARM SEARCH [ECh] Поиск Тревоги [ECh] (состояние Тревога) Операция этой команды идентична операции команды Поиска ROM за исключением того, что только DS18B20 (датчики температуры) с установленным флажком аварии ответят. Эта команда позволяет главному устройству определять, какие DS18B20-сы испытали сигнальное состояние в течение недавнего температурного преобразования. После каждого цикла Поиска Тревоги (то есть, команда Alarm Search, сопровождаемая обменом данных), устройство управления шиной должно возвратитесь к Шагу 1 (Инициализация) в операционной последовательности.
ФУНКЦИОНАЛЬНЫЕ КОМАНДЫ - DS18B20
После того, как устройство управления шиной обработало команду ROM, чтобы обратиться к DS18B20, с которым оно желает связаться, устройство управления может формировать одну из команд функции DS18B20. Эти команды позволяют выполнить функции записи или чтения оперативной памяти DS18B20, инициализировать температурные преобразования или определить режим электропитания. Функциональные команды DS18B20 описанные ниже, сведены в Таблицу 4 и проиллюстрированы на блок-схеме, Рисунок 12.
Конвертировать температуру [44h]
Эта команда начинает единственное температурное преобразование. После окончания преобразования данные сохраняются в 2-байтовом температурном регистре в оперативной памяти, а DS18B20 возвращается в неактивное состояние с низким энергопотреблением. Если устройство используется в режиме паразитного питания, то в пределах не позже 10 мкс (максимальный) после подачи команды устройство управления должно установить высокий уровень на шине на время продолжительности преобразование (tconv). Если DS18B20 питается от внешнего источника питания, главное устройство может считывать состояние шины после команды Конвертирования температуры [44h]. Если на шине логический «Ноль» - это значит, что DS18B20 выполняет температурное преобразование. Если на шине логическая «Единица» – это значит, что преобразование окончено и можно, считывать данные. В режиме использования паразитного питания эта методика уведомления не может использоваться, так как шина должна быть в высоком состоянии в течение всего цикла преобразования температуры. Обратите внимание, что методика контроля времени преобразования по состоянию шины состоит в том, что после команды конвертирования температуры устройство управления должно посылать на шину слот времени и контролировать бит состояния который выдает DS18B20. Если DS18B20 отвечает нулем, то конвертирование идет, если 1 – конвертирование выполнено и можно считывать температуру. Пример программы для PIC16 (для работы с одним устройством на линии) ;================================================================================= ; чтение температуры из DS18B20 celsio ; ;======================================== ; измерение температуры ; call DOUT_LOW ; слот чтения для контроля call DOUT_HIGH ; окончания конвертирования btfss DALLAS ; return ; btfsc CON ; goto ctenie ; call RESET_DALLAS ; btfsc ERROR_D ; return ; датчик неисправен прервать конвертирование температуры ;======================================== movlw H'CC' ; формировать команду Пропустить ROM call DSEND ; movlw H'44' ; формировать команду Конвертировать температуру call DSEND ; ;======================================== bsf CON ; идет конвертирование return ; ;======================================== ctenie ; чтение температуры bcf CON ; конвертирование выполнено ;======================================== call RESET_DALLAS ; btfsc ERROR_D ; return ; датчик неисправен прервать чтение температуры movlw H'CC' ; послать команду Пропустить ROM call DSEND ; movlw H'BE' ; послать команду чтения памяти call DSEND ; call DRECEIVE ; читать 1 байт movf COM_REG,W ; movwf TEMP_LO ; call DRECEIVE ; читать 2 байт movf COM_REG,W ; movwf TEMP_HI ; return ;
Запись в память [4Eh]
Эта команда позволяет устройству управления записывать 3 байта данных в память DS18B20. Первый байт данных записывается в регистр (TH), второй байт записывается в регистр (TL), и третий байт записывается в регистр конфигурации. Данные должны быть переданы наименьшим значащим битом вперед. Для датчиков температуры с паразитным питанием все три байта ДОЛЖНЫ быть записаны командой КОПИРОВАНИЕ ОЗУ В ПЗУ [48h] прежде, чем устройством управления будет сгенерирован импульс сброса, иначе данные будут потеряны.
Чтение памяти [BEh] Эта команда позволяет Устройство управленияу читать содержание ПАМЯТИ. Передача данных начинается с наименьшего значащего бита байта 0 и продолжается до 9-ого байта (байт 8 - циклический контроль избыточности). Устройство управления может выполнить сброс, чтобы закончить чтение в любое время, если необходимо только часть данных. Копирование ОЗУ В ПЗУ [48h] Эта команда копирует содержание регистров (TH, TL) и регистра конфигурации (байты 2, 3 и 4) в ПЗУ. Если устройство используется в режиме паразитного питания, то в пределах не позднее 10 μs (максимально) после подачи этой команды устройство управление должно установить высокий уровень на шине и поддерживать его в течении не менее 10ms. Повторная загрузка [B8h] Эта команда повторно загружает значения регистров (TH, TL) и данные в регистр конфигурации с ПЗУ и размещает данные в байты 2, 3, и 4, соответственно, в памяти. Главное устройство может контролировать процесс загрузки ОЗУ из ПЗУ считывая состояние шины после команды ПОВТОРНАЯ ЗАГРУЗКА. Если на шине логический «ноль» - это значит идет операция перезагрузки, если логическая «1» Операция выполнена. Операция ПОВТОРНАЯ ЗАГРУЗКА [B8h] выполняется автоматически при включении питания, данные доступны сразу после включения питания. Вид электропитания датчика [B4h] Главное устройство генерирует эту команду, чтобы определить используют DS18B20s на шине паразитное питание. Если после подачи команды на шине присутствует логический «ноль» - это значит, что DS18B20 использует паразитное питание. Иначе DS18B20 использует внешнее питание (логическая единица). Обратите внимание после подачи команды опроса необходимо сформировать слот времени после которого DS18B20 выставит на шину бит состояния который можно сосчитать в течении этого слота времени. C.2. Краткий обзор Команды Устройства iButtons могут работать как автономно на шине, так и поддерживают следующие Сетевые Команды на основе ROM:
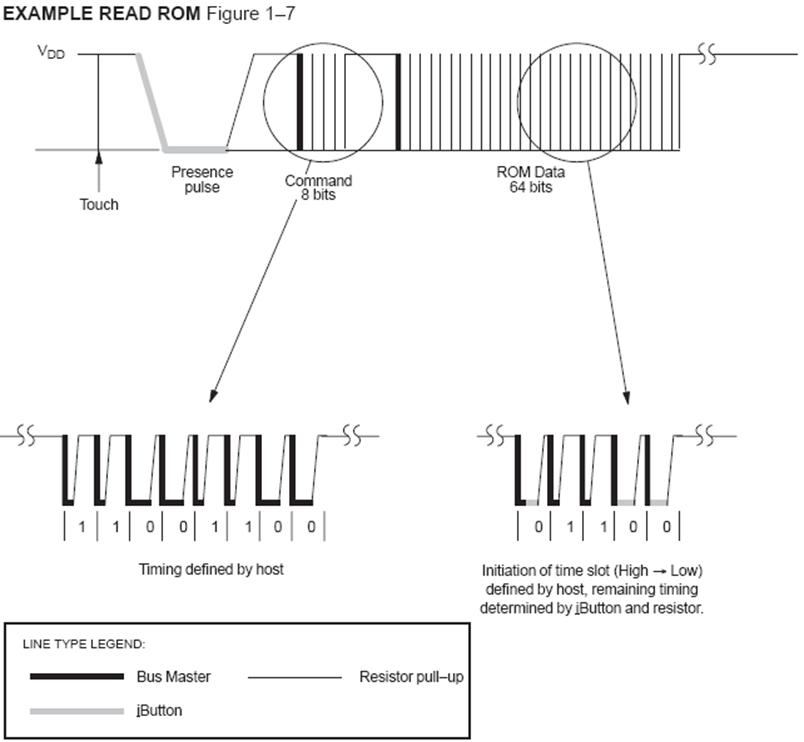
После выполнения любой команды ROM, устройства достигает уровня Транспорта (способно передавать свои данные памяти). Чтение ROM [33h] (Read) используется, чтобы прочитать ROM память устройства, если на шине оно только одно. После посылки этой команды Главное устройство должен генерировать 64 слота времени считывания. iButton пошлет содержимое его ROM памяти младшим битом вперед, начиная с кода семейства, сопровождаемого серийным номером и байтом циклического контроля избыточности. Если на шине несколько iButtons устройств, то для чтения ROM памяти необходимо воспользоваться командой Поиск ROM [F0h] (Search), чтобы определить содержание ROM памяти устройств прежде, чем к ним можно будет обратиться. Если содержание ROM памяти не представляет интерес, потому что на шине только одно iButton, поиск может быть пропущен, посылая команду Пропуск ROM [CCh] (Skip). Немедленно после этой команды, устройство достигает Транспортного уровня. Команды Соответствие ROM [55h] (Match) может использоваться, чтобы обратиться к интересующему устройству, если на шине присутствует несколько iButtons устройств. Код ROM выполняет функцию адреса устройства, чтобы активизировать его Транспортный уровень. Тот же самый Код ROM не может активировать более 1 устройства, так как соответствие кодов ROM только одному устройству определено при их производстве. Если два iButtons имеют то же самое серийный номер, их семейные коды будут отличны. Этим способом, исключается любой беспорядок или неопределенность. После подачи команды Соответствие ROM [55h] (Match), Главное устройством будет послано в течение следующих 64 слотов времени содержание ROM памяти требуемого устройства. Последовательность битов должна быть тем же самым, как они были получены при чтении ROM, то есть, младшим битом вперед, начинаясь с семейного кода, сопровождаемого серийным номером и циклическим контролем избыточности. Все iButtons, ROM которого не соответствует требуемому коду, останутся в неактивном состоянии пока они получат другой Импульс Сброса. C.3. Команда Поиск ROM [F0h] (Search) Если Главное устройство не знает серийный номер устройства подключенного к шине, то существует возможность идентифицировать коды ROM каждого устройства подключенного к шине. Для этого необходимо использовать команду Поиск ROM [F0h] (Search). Эта команда действует как команда Чтения ROM объединенная с командой Соответствия ROM. Процесс выглядит следующим образом: После формирования главным устройством команды Поиск ROM [F0h] (Search) все устройства iButtons последовательно будут формировать на шине состояние «0» и «1» соответствующие их значению фактического бита ROM в течение двух Времен (тактов) считывания после формирования команды ROM Поиска. Если все устройства содержат в этой позиции двоичного разряда: · «0», чтение будет «01»; · «1», результат будет «10»; Если устройства содержат в этой позиции двоичного разряда и «1» и «0», чтение приведет «00» битов, указывая на конфликт. Главное устройство в следующем (третьем такте) слоте Времени формирует разрядное значение 1 или 0, чтобы отобрать устройства, которые останутся в процессе выбора. Все устройства у которых бит не соответствует биту сформированному главным устройством перейдут в состояние ожидания и будут находиться в нем пока они не получают Импульс Сброса. После первой стадия выбора, будут следовать 63 читающих/выбора цикла, пока, наконец, главное устройство не определит Код ROM одного подчиненного устройства и обратиться к нему. Каждая стадия выбора состоит из двух слотов Времени считывания и один слот Времени записи. Полный процесс изучения и одновременная адресация - приблизительно три раза длина команды ROM Соответствия, но это позволяет выбрать из всех связанных устройств последовательно все коды ROM. В приложении, где iButtons устройства подключены к одной шине, это является самым эффективным способом, чтобы определить коды все ROM подчиненных устройств. После чего главное устройство может использовать команду ROM Соответствия, чтобы обратиться к определенному устройству. Если приложение требует постоянной идентификации и коммуникации с новыми устройствами, так как они могут подключаться и отключатся в ходе работы, то устройство управления должно будет использовать команду Поиск ROM, чтобы идентифицировать коды ROM для обращаться к каждому новому устройству. Блок-схеме всех Команд ROM показывают в иллюстрации 5-2. Так как логика команды ROM Поиска самый сложный процесс, следующий пример используется, чтобы иллюстрировать это шаг за шагом. Четыре устройства установлены на шине. Их двоичное содержание ROM следующее: устройство 1: xxxxxx10101100 устройство 2: xxxxxx01010101 устройство 3: xxxxxx10101111 устройство 4: xxxxxx10001000 для упрощения символом «x» заменены старшие биты и показаны только младшие восемь битов содержания ROM. Поиск младшего бита происходить следующим образом: 1. Главное устройство начинает последовательность инициализации · формирует Импульс Сброса. · iButtons отвечают формированием импульсов Присутствия. 2. Тогда Главное устройство формирует команду Поиск ROM. 3. Главное устройство читает один бит с шины. Каждое устройство ответит, помещая значение первого бита соответствующего его данным ROM. Устройства 1 и 4 поместят «0» на шину, то есть, они установят на шине низкий уровень. Устройства 2 и 3 сформируют «1» позволяя на линии оставаться в высоком уровне. Результат – «логическое И» всех устройств на линии; поэтому Главное устройство читает 0. Главное устройство будет читать следующий бит. (С тех пор когда команда Search ROM выполняется, все устройства отвечают одновременно). Все устройства помещают на шину дополнение первого бита их соответствующего. Устройства 1 и 4 сформируют «1»; устройства 2 и 3 сформируют «0». Таким образом, на шине будет состояние логического «0». Главное устройство снова читает «0» при формировании дополнительного кода первого информационного разряда ROM (чтение дает «00» - состояние разрядных конфликтов). Это говорит Главному устройству, что есть устройства на шине содержащие в первом бите как «0», так и «1». Если бы все устройства имели «0» в этой позиции двоичного разряда, чтение дало бы результат «01»; если бы позиция двоичного разряда содержала во всех устройства «1» результат был бы «10». 4. Главное устройство теперь решает писать «0» и формирует запись его на шину. Эта операция переводит Устройства 2 и 3 (содержащие в этом разряде «1») в пассивное состояние, оставляя только устройства 1 и 4 для участия в процессе поиска. 5. Главное устройство выполняет еще два чтения и получает «01». Это говорит, что все активные устройства имеют 0 в этой позиции двоичного разряда их ROM. 6. Главное устройство тогда пишет 0, чтобы сохранить устройства 1 и 4 активными. 7. Главное устройство выполняет два чтения и получает два «00» биты. Это снова указывает, что в этом разряде присутствуют устройства имеющие «1» и «0. 8. Главное устройство снова пишет 0. Это деактивирует устройство 1, оставляя устройство 4 как единственный активный элемент. 9. Следующие чтения до конца ROM не будет давать состояние разрядных конфликтов. Отсутствие разрядных конфликтов до конца цикла поиска говорит, что происходит чтение ROM только одного активного элемента. Прочитав следующий бит Главное устройство снова посылает этот бит, чтобы сохранить устройство активным. Как только все биты ROM устройства известны и последнее бит снова послан Главным устройством, устройство готово к принять команду Транспортного уровня (для обмена информацией). 10. Главное устройство должно изучить данные ROM других устройств. Поэтому оно запускает следующую последовательность Поиска ROM, повторяя шаги 1 - 7. 11. В самой старшей позиции двоичного разряда, где Главное устройство писало «0» в первом проходе (шаг 8), оно теперь пишет «1». Это снимает выделение устройства 4, оставляя устройство 1 активным. 12. Как в шаге 9, следующие чтения до конца ROM не будет давать состояние разрядным конфликтам. Этим заканчивается второй Поиск ROM, где Главное устройство считывает содержание ROM другого устройства. 13. Главное устройство должен изучить данные ROM других устройств. Поэтому, оно запускает следующую последовательность Поиска ROM, повторяя шаги 1 - 3. 14. Во втором проходе в наивысшей степени позиция двоичного разряда, где Главное устройство написал 0 в первом проходе (шаг 4), это теперь пишет 1. Это снимает выделение устройств 1 и 4, оставляя устройства 2 и 3 активными. 15. Главное устройство посылает два слота времени считывания и получает два 0 битов, указывая маленький конфликт. 16. Главное устройство снова решает писать 0. Это снимает выделение устройство 3, оставляя устройство 2 как единственное активное устройство. 17. Как в шаге 9, следующие чтения до конца ROM не будет показывать разрядным конфликтам. Этим заканчивается третий Поиск ROM проходит, где Главное устройство имеет изученный содержание другого ROM. 18. Главное устройство должен изучить данные ROM других устройств. Поэтому это запускает другую последовательность Поиска ROM повторяя шаги 13 - 15. 19. В самой высокой позиции двоичного разряда, где Главное устройство написал a 0 в предыдущем проходе (ступают 16), это теперь пишет 1. Это снимает выделение устройства 2, оставляя устройство 3 активным. 20. Как в шаге 17, следующие чтения до конца ROM не будет показывать разрядным конфликтам. Это заканчивает четвертый Поиск ROM проходит, где Главное устройство имеет изученный содержание другого ROM. Общий принцип этого процесса поиска должен снять выделение одно устройство за другим в каждой противоречивой позиции двоичного разряда. В конце каждого процесса Поиска ROM, Главное устройство узнал содержание другого ROM. Следующий проход является тем же самым как предыдущий проход до пункта последнее решение. В этом пункте Главное устройство входит в противоположность руководство и продолжается. Если другой конфликт найден, снова 0 написан, и так далее. После обоих путей в самом высоком противоречивая позиция двоичного разряда сопровождается до конца, Главное устройство идет тот же самый путь как прежде, но решающий противоположно в более низкой противоречивой позиции двоичного разряда, и так далее, до всех Данные ROM идентифицированы. Оптимизированная блок-схема алгоритма ROM Поиска показанна в иллюстрации 5-3. Это число объясняет, как выполнить общий поиск ROM. Ради этого блок-схема, данные ROM накоплены в маленький массив, названный Бит ROM, с битами нумеровал 1 - 64. Установка должна назовите перед любой другой функцией, чтобы инициализировать Система с 1 проводом. Звонок "в Первые" сбросы поиск к начало и идентифицирует первый код ROM, и призывает "Затем" идентифицируйте последовательные коды ROM. Ложное значение возвращенное указывает не больше кодов ROM, которые будут найдены. Время, требуемое изучать содержание одного ROM (нет считая процессорное время Главное устройство) - 960 ms + (8+3*64) *61 ms =13.16 ms. Таким образом возможно идентифицировать до 75 различный iButtons в секунду. ROM COMMANDS FLOW CHART Figure 11
DS18B20 FUNCTION COMMAND SET Table 4
ПРИМЕЧАНИЯ: 1) При паразитном питании DS18B20s, Главное устройство должно выдать на шину «сильную» 1 в течение температурного преобразования и копирования ОЗУ в ПЗУ. Никакая другая операция на шине в это время не может выполняться. 2) Главное устройство может прервать передачу данных в любое время, импульсом сброса. Проше, говоря, прочитали любое количество байтов (битов) и все. 3) При чтении температуры до команды температурного преобразования читается число 85, это число записывается в регистр температуры при подаче питания на датчик (код инициализации). 4) Все три байта должны быть сохранены в ПЗУ прежде, чем будет сформирован импульс сброса.
Сопротивление резистора надо выбирать из компромисса между сопротивлением используемого кабеля и внешними помехами. Сопротивление резистора может быть от 5,1 до 1 кОм. Для кабелей с высоким сопротивлением жил надо использовать более высокое сопротивление. А там где присутствуют промышленные помехи – выбирать более низкое сопротивление и использовать кабель с более большим сечением провода. Для телефонной лапши (4 жилы) для 100 метров необходимо резистор 3,3 кОм. Если вы применяете «витую пару» даже 2 категории длина может быть увеличена да 300 метров!!! ГАРАНТИРОВАННО. А при использовании схемы с внешним драйвером до 600.
DS18B20 использует строгий протокол коммуникации 1-Wire проводом, чтобы застраховать целостность данных. Несколько типов сигнала определены в соответствии с этим протоколом: импульс сброса, импульс присутствия, запись 0, запись 1, чтение 0, и чтение 1. Устройство управления формирует все эти сигналы на шине, за исключением импульса присутствия. Процедура инициализации: импульсы сброса и присутствия Весь процесс связи с DS18B20 начинается с последовательности инициализации, которая состоит из импульса сброса от устройства управления (УУ), сопровождаемого импульсом присутствия от DS18B20. Это иллюстрировано на рис. 13. Когда DS18B20 посылает импульс присутствия в ответ на сброс, это указывает УУ, что DS18B20 находится на шине и готов работать. В течение последовательности инициализации устройство управления шиной передает (TX) импульс сброса, перемещая шину 1-Wire bus в состояние логического «0» минимум 480 ms. Устройство управления шиной отпускает шину и переходит в режим приема (RX). Когда шина отпущена, (5 кОм max) подтягивающий резистор перемещают шину в уровень логической «1». Когда DS18B20 обнаруживает положительный перепад, он ждет от 15 ms до 60ms и затем передает импульс присутствия, перемещая шину в логический «0» на длительность от 60 ms до 240ms. Initialization timing figure 13
Слоты времени - чтения/записи Устройство управления шиной записывает данные в DS18B20 в течение слотов времени записи и читает данные от DS18B20 в течение слотов времени считывания. Один бит данных передается за один слот времени. Слоты времени записи Есть два типа слотов времени записи: · Слот времени записи «1» - W1 · Слот времени записи «0» - W0 Устройство управления шиной использует W1 чтобы записать бит логической «1» в DS18B20 и W0, чтобы записать бит логического «0» в DS18B20. Все слоты времени записи должны быть продолжительностью минимумом 60ms разделенные импульсом восстановления минимумом 1ms. Оба типа слотов времени записи инициализируются устройством управления, устанавливающим на шине логический ноль (см. Рисунок 14). Чтобы генерировать W1, после формирования импульса восстановления, устройство управления шиной должно отпустить шину в пределах 15ms. Когда шина отпущена, подтягивающий резистор переместит уровень на шине к логической «1». Чтобы генерировать W0, после формирования импульса восстановления, устройство управления шиной должно продолжать удерживать шину продолжительностью всего слота времени (не менее 60ms). DS18B20 после формирования импульса восстановления выполняет выборку сигнала через 15ms в течение окна, которое продолжается от 15ms до 60ms, и инициализирует слот времени записи. Если уровень на шине высокий в течение окна выборки, осуществляется запись 1 в DS18B20. Если уровень низкий, осуществляется запись 0 в DS18B20. Временные диаграммы слотов записи и чтения рис. 14.
Слоты времени считывания предназначены для определения состояния устройства. DS18B20 может передать данные о своем состоянии устройству управления только, когда устройство управления формирует слоты времени считывания. Для команд Чтения Памяти [BEh] или команды Чтения Вида Питания [B4h] устройство управления должно генерировать слоты времени считывания немедленно после формирования этих команд, это необходимо, чтобы DS18B20 мог обеспечить требуемые данные. Кроме того, устройство управления может генерировать слоты времени считывания после команды Конвертирования [44-ого] или команды Recall E2 [B8h], чтобы узнать о состояние операции, как объяснено в разделе КОМАНДЫ ФУНКЦИИ DS18B20. Все слоты времени считывания должны быть минимумом 60ms и разделяться импульсами восстановления минимумом 1ms между слотами. Слот времени считывания инициализирован главным устройством, устанавливает на шине уровень логического нуля минимум на 1ms и затем отпускает шину (см. иллюстрацию 14). После того, как Устройство управления инициализирует слот времени считывания, DS18B20 начнет передавать 1 или 0 на шине. DS18B20 передает 1, оставляя шину в высоком уровне и передает 0, устанавливая на шине 0. Выходные данные от DS18B20 достоверны через 15ms после отрицательного уровня, который инициализировал слот времени считывания. Поэтому, Устройство управления должен выпустить шину и затем начать считывание шины не ранее 15ms от начала слота.
Иллюстрация 15
иллюстрирует это сумма
TINIT,
TRC, и
TSAMPLE
должен быть меньше чем 15ms для слота времени
считывания. Показы иллюстрации 16, что система, рассчитывающая край развернута,
сохраняя
TINIT
и
TRC, почти как возможный и определяя
местонахождение главного типового времени в течение слотов времени считывания к
концу 15ms
период.
CRC GENERATION CRC bytes are provided as part of the DS18B20’s 64-bit ROM code and in the 9th byte of the scratchpad memory. The ROM code CRC is calculated from the first 56 bits of the ROM code and is contained in the most significant byte of the ROM. The scratchpad CRC is calculated from the data stored in the scratchpad, and therefore it changes when the data in the scratchpad changes. The CRCs provide the bus master with a method of data validation when data is read from the DS18B20. To verify that data has been read correctly, the bus master must re-calculate the CRC from the received data and then compare this value to either the ROM code CRC (for ROM reads) or to the scratchpad CRC (for scratchpad reads). If the calculated CRC matches the read CRC, the data has been received error free. The comparison of CRC values and the decision to continue with an operation are determined entirely by the bus master. There is no circuitry inside the DS18B20 that prevents a command sequence from proceeding if the DS18B20 CRC (ROM or scratchpad) does not match the value generated by the bus master. The equivalent polynomial function of the CRC (ROM or scratchpad) is: CRC = X8 + X5 + X4 + 1 The bus master can re-calculate the CRC and compare it to the CRC values from the DS18B20 using the polynomial generator shown in Figure 9. This circuit consists of a shift register and XOR gates, and the shift register bits are initialized to 0. Starting with the least significant bit of the ROM code or the least significant bit of byte 0 in the scratchpad, one bit at a time should shifted into the shift register. After shifting in the 56th bit from the ROM or the most significant bit of byte 7 from the scratchpad, the polynomial generator will contain the re-calculated CRC. Next, the 8-bit ROM code or scratchpad CRC from the DS18B20 must be shifted into the circuit. At this point, if the re-calculated CRC was correct, the shift register will contain all 0s. Additional information about the Dallas 1-Wire cyclic redundancy check DS18B20 is available in Application Note 27: Understanding and Using Cyclic Redundancy Checks with Dallas Semiconductor Touch Memory Products.
Генерирование ЦИКЛИЧЕСКОГО КОНТРОЛЯ ИЗБЫТОЧНОСТИ Байты циклического контроля избыточности обеспечиваются как часть 64-битового кода ROM DS18B20’s и в 9-ом байте сверхоперативной памяти. Циклический контроль избыточности кода ROM вычислен от первых 56 битов кода ROM и содержится в наиболее значительном байте ROM. Сверхоперативный циклический контроль избыточности вычислен от данных, сохраненных в сверхоперативном, и поэтому это изменяется когда данные в сверхоперативных изменениях. Контроль с помощью циклического избыточного кода предоставляет устройству управления шиной метод проверки правильности данных, когда данные читаются от DS18B20. Чтобы проверять, что данные читались правильно, устройство управления шиной должно повторно вычислить циклический контроль избыточности от полученных данных и затем сравнить это значение с любым циклический контроль избыточности кода ROM (для чтений ROM) или к сверхоперативному циклическому контролю избыточности (для сверхоперативных чтений). Если расчетный циклический контроль избыточности соответствует циклическому контролю избыточности чтения, полученные данные были свободные от ошибок. Сравнение значений циклического контроля избыточности и решения продолжаться с операцией определено полностью устройством управления шиной. Нет никакой схемы в DS18B20, который препятствует последовательности команды продолжаться, если циклический контроль избыточности DS18B20 (ROM или сверхоперативный) не соответствует значению, сгенерированному устройством управления шиной. Эквивалентная полиномиальная функция циклического контроля избыточности (ROM или сверхоперативный): CRC = X8 + X5 + X4 + 1 Устройство управления шиной может повторно вычислить циклический контроль избыточности и сравнить это со значениями циклического контроля избыточности от DS18B20, используя полиномиальный генератор, которому показывают в иллюстрации 9. Эта схема состоит из сдвигового регистра и Гейтса XOR, и биты сдвигового регистра инициализированы к 0. Старт с наименьшего значащего бита кода ROM или наименьшего значащего бита байта 0 в ОЗУ, один бит одновременно должен сдвинутый в сдвиговый регистр. После смещения в 56-ом бите от ROM или наиболее значительного бита байта 7 от ОЗУ, полиномиальный генератор будет содержать перерасчетный циклический контроль избыточности. Затем, 8-битовый код ROM или сверхоперативный циклический контроль избыточности от DS18B20 должны быть сдвинуты в схему. В этом пункте, если перерасчетный циклический контроль избыточности был правилен, сдвиговый регистр будет содержать весь 0s. Дополнительная информация о вычислении CRC можно найти http://invent-systems.narod.ru/CRC.htm DS18B20 OPERATION EXAMPLE 1 В этом примере используется несколько DS18B20s на шине, с паразитным питанием. Устройство управления шиной инициализирует температурное преобразование в определенном DS18B20 и затем читает его ОЗУ и вычисляет циклический контроль избыточности, чтобы проверить данные.
DS18B20 OPERATION EXAMPLE 2 В этом примере используется только один DS18B20 на шине, с паразитным питанием. Устройство управления посылает данные (TH, TL, and config) к регистрам конфигурации в ОЗУ DS18B20, а затем читает ОЗУ повторно вычисляя циклический контроль избыточности, чтобы проверить данные. Далее устройство управления копирует содержание ОЗУ в EEPROM.
Приложение. Пример подпрограмм на ассемблере для серии PIC16 и тактовой 4 мГц (подразумевается использования внутреннего генератора, сама программа приведена выше, для чтения двух байт температуры, без контроля достоверности данных). ;====================================================================================== ; DOUT_LOW: Эта подпрограмма устанавливает линию ДАЛЛАССа на вывод и устанавливает на ней "0" DOUT_LOW bcf DALLAS ; установить низкий уровень на шине bsf STATUS,RP0 ; выбрать банк 1 bcf TRISDAL,LINE ; настроить порт на выход bcf STATUS,RP0 ; выбрать банк 0 nop ; nop ; retlw .0 ; ;====================================================================================== Примечание: обратите особое внимание на формирование импульса восстановления DOUT_HIGH, это так называемый «Активный» импульс восстановления, когда на стандартное заданное время в линию для восстановления уровня закачивается ток с порта контроллера. Этот эффект позволяет значительно улучшить фронт сигнала. Формирование фронтов таким образом - это гарантия работы на удаленные датчики!!! ;======================================================================================= ;DOUT_HIGH: Эта подпрограмма устанавливает линию ДАЛЛАССа как ввод, продавливает высоким уровнем шину, ;а затем переводит линию на прием, внешний резистор удерживает высокий уровень DOUT_HIGH bsf DALLAS ; задержка для длинных линий для ; nop ; формирования импульса восстановления ; nop ; (на очень длинные линии) ; nop ; ; nop ; bsf STATUS,RP0 ; выбрать банк 1 bsf TRISDAL,LINE ; настроить порт на ввод (имитация открытого коллектора) bcf STATUS,RP0 ; выбрать банк 0 retlw .0 ; ;======================================================================================= ;======================================================================================= ; DLIT_WR: Эта подпрограмма используется в ходе работы подпрограмм связи ; задержка 60 mks, в которая необходима DS1820 для чтения или записи бита данных. DLIT_WR ; movlw .20 ;.20 - 60mks movwf TEMP0 ; decfsz TEMP0,F ; goto $-.1 ; retlw H'00' ; ;======================================================================================= ;======================================================================================= ; DRECEIVE: Эта подпрограмма получает данные от ДАЛЛАССКОГО чипа. DRECEIVE movlw H'08' ; Количество получаемых бит movwf TEMP1 ; Загрузка регистра счетчика C_DRECEIVE call DOUT_LOW ; старт чтения бита установить низкий уровень) call DOUT_HIGH ; начать чтение btfss DALLAS ; проверить уровень на линии DALLAS1 bcf STATUS,C ; установить С в "0" btfsc DALLAS ; проверить уровень на линии DALLAS1 bsf STATUS,C ; нет установить С в "1" rrf COM_REG,F ; сдвиг вправо для записи в регистре COM_REG call DLIT_WR ; ожидать для окончания формирование далласом бита decfsz TEMP1,F ; goto C_DRECEIVE ; retlw H'00' ; ;======================================================================================= ;======================================================================================= ; DSEND: Эта подпрограмма посылает команды к DS1820. Данные ; посылается младшим битом сначала без четности, останова, или битов начала DSEND movwf COM_REG ; Загрузка бофера команд для пересылки movlw H'08' ; Количество битов для пересылки movwf TEMP1 ; C_DSEND call DOUT_LOW ; Start the write slot rrf COM_REG,F ; Сдвиг вправо, чтобы определить через бит С первый бит для пересылки btfss STATUS,C ; Смотреть бит С == 1 goto SEND0 ; call DOUT_HIGH ; Установить линию в "1" если бит С == 1 goto DS_1 ; SEND0 call DOUT_LOW ; Установить линию в "0", если бит С == 0 DS_1 call DLIT_WR ; Ожидать 60uS, чтобы позволить DS1820 выполнить выборку call DOUT_HIGH ; Установить шину в "1" decfsz TEMP1,F ; Уменьшить счетчик переданных битов и проверить достигнут ли ноль goto C_DSEND ; Повторить передачу бита retlw H'00' ; ;======================================================================================= Пример описания портов для подключения DS18B20. ;======================================================================================= ; описание портов подключения датчика. #define TRISDAL TRISA ; регистр управления порта ДАЛЛАСА #define PORTDAL PORTA ; регистр данных порта ДАЛЛАСА #define LINE 3 ; линия порта ДАЛЛАСА #define DALLAS PORTA,3 ; шина связи с ДАЛЛАСОМ ;=======================================================================================
Статья в формате pdf
Для получения дополнительной информации используйте: | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|